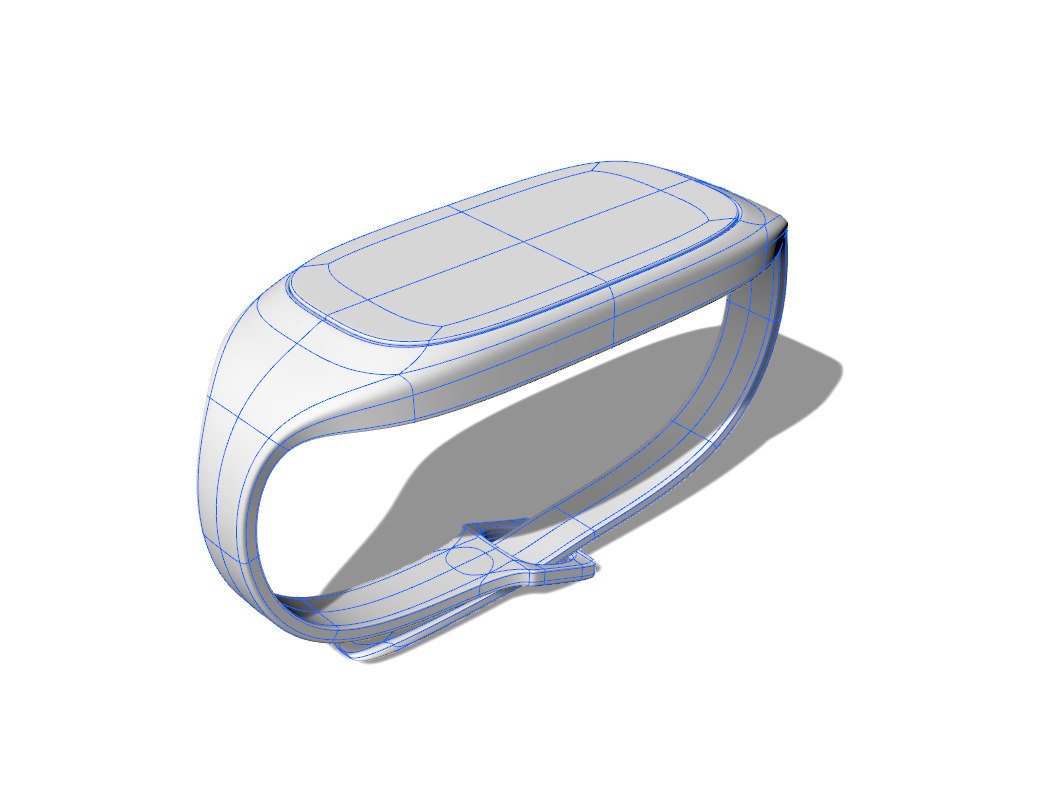
今天我们用Rhino犀牛7SubD做个智能手环
这里先给个SubD操作小提示:双击线可自动选择连续曲线
主要运用了犀牛7的几个工具
 SubD桥接、对称、补洞
SubD桥接、对称、补洞
其他都是拉扯操作轴的控杆缩放、实心点和箭头方向来调整
下面看一下如何建模
首先在SubD Tools工具栏上选择SubD box命令
在顶视图建一个box,

选择面向上拉扯,形状厚度大小调节可以选择面直接拉扯箭头来调整

选择侧面曲面,拉扯操作轴的实心点,拉伸出曲面


再把面删除,选择曲线缩放调整,拉扯操作轴的控杆可缩放调整(按住Shift键拉控杆可整体缩放)
再把线按操作轴的实心点来拉伸出面


选择 对称细分物件,如下图
对称细分物件,如下图

取消对称,手环扣通过拉扯拉伸的方法,如下图

把中间曲面删除,拉扯线调整

再用 桥接,把截面补上,把手环拉扯成倾斜,再把另一端环带拉扯穿过环扣
桥接,把截面补上,把手环拉扯成倾斜,再把另一端环带拉扯穿过环扣

删除手环面,选择边缘线拉扯操作轴控杆向内缩放,通拉扯的方式做好
具体可看视频演示


我想问一下 为啥我的犀牛7用这个细分曲面的时候 框选面,线,点的时候,框选不出来
在犀牛界面上齿轮设置-鼠标-选取-勾选允许框选子物休